



Home» Screw Jack System » Product Detail
Products
 |
THE NAME:
Three Lifting Points Systems
Model: 1-ton - 100-tons
Categories: Screw Jack System »
Place of Origin: Made In China
Brand Name: JACTON
Download: 






Description:
A three point lift system was devised using three screw jacks, bevel gearboxes, couplings and drive shafts. The system was designed to be quick and easy to use by motorized or hand operation while being self-locking. Using metric machine screw jacks on the screw provided a mechanism that was self-locking and minimum torque input for hand operation.

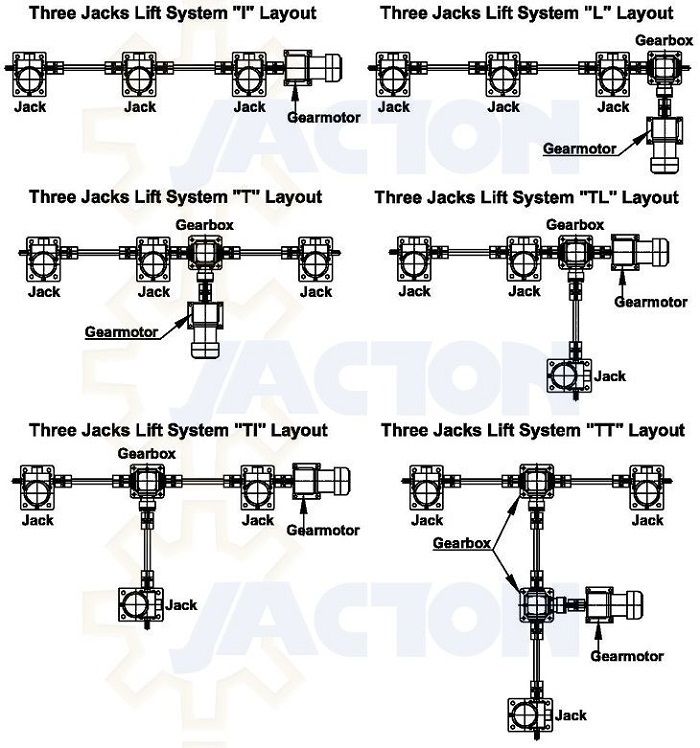
Three Lifting Points Systems Configurations
* I - configuration: 3pcs worm gear screw jacks+5pcs couplings+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* L - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* T - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TL - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TI - configuration: 3pcs worm gear screw jacks+7pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TT - configuration: 3pcs worm gear screw jacks+9pcs couplings+2pcs miter gearboxes+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
Note: When connecting shafts length is exceed maximum distance of between supports, Pillow blocks are required.
Three Lifting Points Systems Configurations
* I - configuration: 3pcs worm gear screw jacks+5pcs couplings+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* L - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* T - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TL - configuration: 3pcs worm gear screw jacks+6pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TI - configuration: 3pcs worm gear screw jacks+7pcs couplings+1pc miter gearbox+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
* TT - configuration: 3pcs worm gear screw jacks+9pcs couplings+2pcs miter gearboxes+1pc motor/reducer (electrically) or 1pc hand wheel (manually).
Note: When connecting shafts length is exceed maximum distance of between supports, Pillow blocks are required.
Previous Product:Two Lifting Points Systems
Next Product:Four Lifting Points Systems
Related Product
More products









Product List
Manual Electric Screw Jack
Worm Screw Jack
- JTC Cubic Screw Jack
- JTM Worm Screw Jack
- JSS Stainless Steel Jack
- JT Acme Screw Jack
- JTW Machine Screw Jack
- Through Holes Screw Jack
- Custom Made Screw Jack
Ball Screw Jack
Bevel Gear Jack
Miter Gearbox
- JT Classic Miter Gearbox
-
- Order Code for Classic Miter Gearbox
- Classic Miter Gearbox description
- JT15 Miter Gearbox
- JT19 Miter Gearbox
- JT25 Miter Gearbox
- JT32 Miter Gearbox
- JT40 Miter Gearbox
- JT45 Miter Gearbox
- JT50 Miter Gearbox
- JT60 Miter Gearbox
- JT72 Miter Gearbox
- JT85 Miter Gearbox
- Flange Input Solid Output Shaft Gearbox
- JTP Cubic Miter Gearbox
-
- Order Code for Cubic Miter Gearbox
- Cubic Miter Gearbox description
- JTP65 Small Miter Gearbox
- JTP90 Miter Gearbox
- JTP110 Miter Gearbox
- JTP140 Miter Gearbox
- JTP170 Miter Gearbox
- JTP210 Miter Gearbox
- JTP240 Miter Gearbox
- JTP280 Miter Gearbox
- Solid Input and Output Shafts Gearbox
- Solid Input and Hollow Output Gearbox
- Flange Input and Solid Output Gearbox
- Flange Input and Hollow Output Gearbox
- JTA Alu. Miter Gearbox
Lift System and Accessories
- Screw Jack System
- Lift System Accessories
-
- Flexible Jaw Coupling
- Overload Safety Couplings
- Aluminum Couplings
- Telescopic Universal Joint
- Rigid Shaft Couplings
- Universal Joint
- Cast Iron Hand Wheel
- Connecting Shafts
- Aluminum Handwheel
- YVF2 Series Variable Speed AC Motor
- Brake motors
- Three Phase Electric Motor
- Screw Jack Motor Flange
- Single Phase Induction Motors
- K Helical Bevel Geared Motor
- R Helical Geared Motor
- Worm Gear Reducer
- 12V 24V DC Geared Motor
- Proximity Switches
- Limit Switches
- Pillow Blocks
- Pillow Block Flange Bearing
- Digital Position Indicator
- Flange Blocks
- Ball Joint Rod End Bearing
- Bellows Boot
- Helical Gear Motor
- 12V 24V DC Motor
- Linear Bushings and Shafts
- Trunnion Adapters
- Servomotor
- Rotary Encoder
- Low Backlash Planetary Gearheads
- Stepper Motor
- 24V Planetary Gear Reducer
- Planetary Speed Reducer
- Frequency Inverter
- Hydraulic Cylinder Rod End Bearing
- Lift System Applications
Linear Actuators
- LAP Electric Linear Actuator
-
- 100KG Parallel Electromechanical Linear Actuators
- 250KG Parallel Electro Mechanical Linear Actuators
- 500KG Parallel Mount Rod Style Linear Actuators
- 630KG Parallel Mount Electric Cylinder Linear Actuators
- 1000KG Parallel Mount Industrial Linear Actuators Acme Screw
- 1600KG Parallel Electro-mechanical Actuators Heavy Duty
- 2500KG Parallel Mount Electric Cylinders Actuator
- 4000KG Heavy Duty Electric Linear Actuators Parallel Mount
- 6300KG Parallel Motor Drive Electric Actuator Linear Actuator
- 8000KG Parallel Electric Motor-Drive Linear Actuator
- 10000KG Parallel Mount Motorized Electric Linear Actuator
- 15000KG Parallel Industrial Motor Linear Actuator
- 20000KG Parallel Indistrial Motor Drive Linear Actuator
- 25000KG Parallel Electric Motor Linear Electric Actuator
- LA Electric Linear Actuators
-
- 10KG In-line Mini Electric Linear Actuators with Brake Motor
- 25KG In-line Electric Linear Actuator Push Rod
- 63KG In-line 700mm Stroke Electric Motor Linear Actuator
- 90KG In-line High Speed Motor Drive Electric Linear Actuator
- 100KG In-line Fast Speed Electric Linear Motor Linear Actuator
- 300KG Inline Industrial Electromechanical Linear Actuator
- 500KG In-Line Electric Linear Actuator
- 700KG Inline Heavy Electro Mechanical Actuators
- 1000KG In-line Heavy Duty AC Volt Industrial Linear Actuators
- JTE Classic Electric Cylinder
- Mechanical Linear Actuators
- JCA Cubic Electric Cylinder
Application





Jacton Industry Co.,Ltd.
 Contact: Warren Lee
Contact: Warren Lee
 Skype: jactonjack
Skype: jactonjack
 T: 86-769-81585810
T: 86-769-81585810
 F: 86-769-81585852
F: 86-769-81585852
 E: sales@jactonindustry.com
E: sales@jactonindustry.com
 W: www.screw-jack.com
W: www.screw-jack.com





Contact: Warren LeeSkype: jactonjackT: 86-769-81585810 F: 86-769-81585852 E: sales@jactonindustry.com W: www.screw-jack.com
VAT No. 9144190007026567X3, Copyright ©2013 www.screw-jack.com Jacton Industry Co.,Ltd. All Rights Reserved Site Map
Building 2, No. 1, DongCheng Road, Chang An, Dongguan, Guangdong, China. Phone: 86-769-81585810 | Fax: 86-769-81585852
China Screw Jack,Ball Screw Jack,Machine Screw Jack,Worm Gear Screw Jack,Bevel Gear Screw Jack,Miter Gearbox,Screw Jack Lift System Manufacturer
China Screw Jack,Ball Screw Jack,Machine Screw Jack,Worm Gear Screw Jack,Bevel Gear Screw Jack,Miter Gearbox,Screw Jack Lift System Manufacturer